运输接收者#
Transport Receiver任务通过消息总线执行舰队管理(AGV)。它接收命令(通常来自工厂自动化工作流)并将数据转发给舰队管理驱动程序
输入#
| 名称 | 数据类型 | 值 | 是否是触发器 | 描述 |
|---|---|---|---|---|
| fleetManagerType | string | 否 | 舰队管理器类型(用于区分各种实现) | |
| 激活 | Any | 是 | 激活任务执行 |
Table: 传输接收方输入
输出#
| 名称 | 数据类型 | 值 | 描述 |
|---|---|---|---|
| source | any | 请求的来源 | |
| destination | any | 请求的目标任务 | |
| priority | Integer | 请求优先级 | |
| unit | any | 要创建的作业的输入数据 | |
| ID | any | 作业ID | |
| 数据 | any | 作业的数据 | |
| jobId | any | 作业ID | |
| 成功 | Boolean | 如果没有问题,则发出true | |
| 错误 | Error | 处理此任务期间发生的错误 |
Table: 传输接收方输出
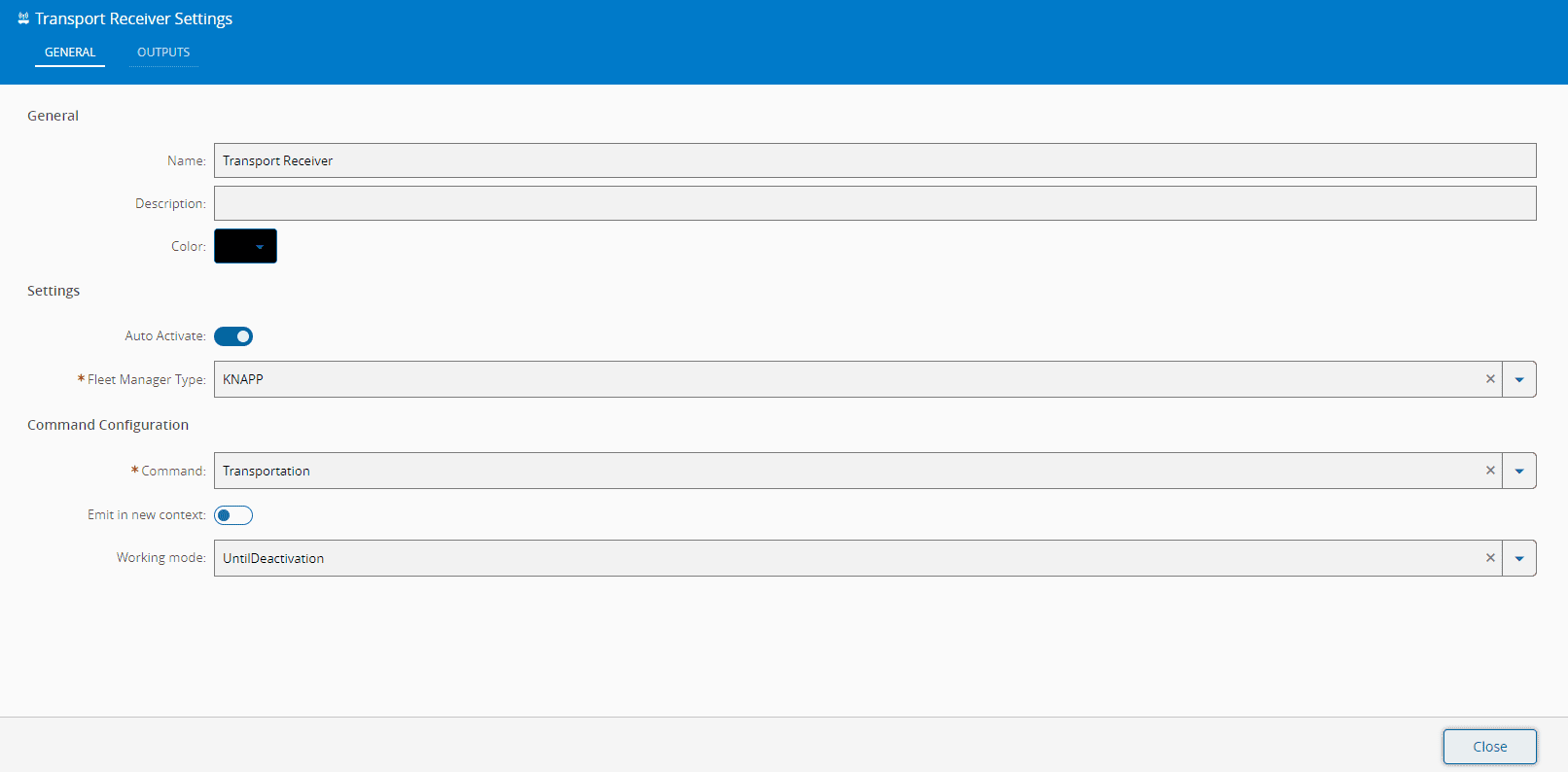
设置#
在General选项卡上,您有常用设置和以下选项设置:
| 名称 | 数据类型 | 值 | 默认 | 描述 |
|---|---|---|---|---|
| 车队管理人员类型 | enum | KNAPPMIRCustom | KNAPP | 车队管理人员类型(用于区分实施情况)。如果选择了自定义,则必须指定车队管理人员类型 |
| 命令 | enum | TransportationInteractionCancelTransportationStatusUpdate | Transportation | 发送给车队管理人员的命令。 |
| 工作模式 | enum | UntilDeactivationNumberOfOccurrences | UntilDeactivation | 命令执行的工作模式。 |
| 在新上下文中发出 | boolean | false | 发出输出时创建新的执行上下文 | |
| 自动激活 | Boolean | false | 确定是否应在收到实体时执行激活 | |
| 出现次数 | Integer | 1 | 定义同一主题中命令的最大数量(通常由接收方用来计算发生的命令数)。如果该数字小于1,则视为命令没有最大数量限制 |
Table: 传输接收方设置
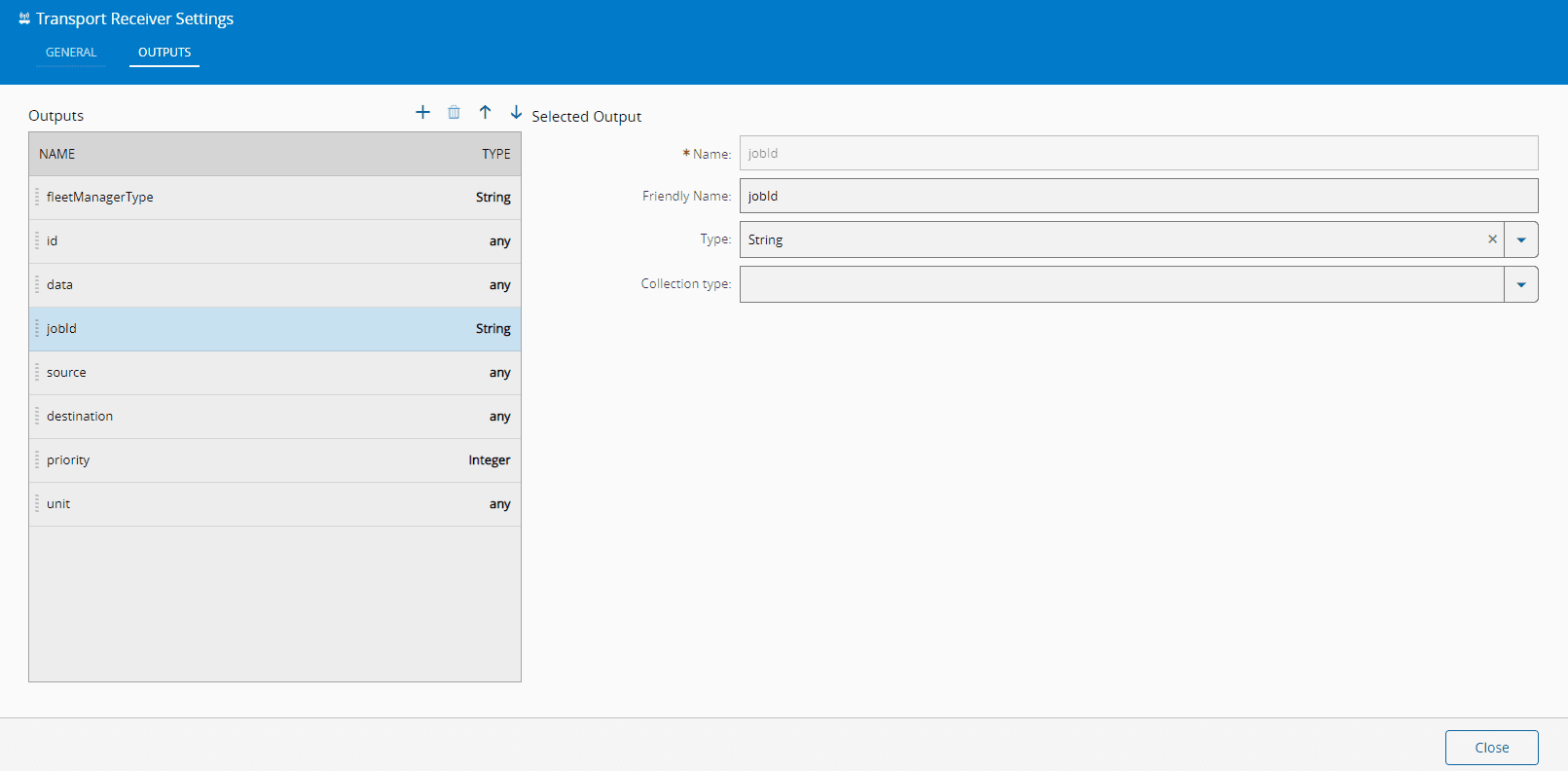
其他输出可在Outputs选项卡中定义:
行为#
此任务应在workerManager嵌套作业流程(在作业执行期间)内使用。您应该提供与任务相关的配置、车队相关的配置(车队管理人员类型和要执行的命令)以及与通信相关的设置(超时)
Info
只有当非False值发送至激活输入时,Transport Receiver任务才会激活。
备注#
无。